WWW.NC-SERVO.COM
NC-SERVO网站介绍1995年-2014年期间在北京航空航天大学机械工程及自动化学院-数控和伺服技术实验室学习的博士和硕士研究生研究成果,以及郇极教授开发的虚拟数控机床和工业机器人。内容包括数控系统硬件结构、软件结构、控制理论和方法、数控仿真软件、工业机器人仿真软件、现场总线技术等。网站选编了实验室发表的部分研究论文和出版专著,以及郇极教授开发的安卓手机版数控车床仿真软件apk、安卓平板电脑数控车床仿真软件apk、安卓手机版数控铣床仿真软件apk、安卓平板电脑数控铣床仿真软件apk、安卓手机版工业机器人仿真软件apk、安卓平板电脑工业机器人仿真软件apk。
(1)论文内容包括:基于平板电脑的数控系统、样条插补、NURBS样条插补、工业以太网EtherCAT报文解析、基于以太网器件的现场总线、STEP-NC、5坐标数控系统坐标变换、飞机制造柔性工装数控系统、数控和伺服系统电力线通信、IEC61131-3编程语言数控系统软件、工业机器人CAD/CAM编程、EtherCAT总线、CAN总线、数控凸轮磨控制、数控机床动态运动误差分析、工业机器人动态运动误差分析、SERCOS总线、数控飞剪控制、数控机械控制、蓝牙通信、数控系统远程服务功能、IEEE1394总线、数控刀具磨编程软件、数控机床故障诊断方法(基于浏览器)、开放式数控系统、现场总线数控系统、多通道数控系统、扩展数控编程语言、数控车床自动编程、数控车床加工图形仿真等。
论文由郇极、马方魁、刘喆、胡星、肖文磊、靳阳、杨东升、刘艳强、马维民、黄永生、尹旭峰、刘迟斌、徐成莺、魏继光、王剑、舒智勇、胡梅梅完成。
(2)产品包括:①虚拟工业机器人和虚拟数控机床,具备数控机床和工业机器人译码、插补、刀具补偿、固定循环、加工过程图形显示等功能,在安卓操作系统的平板电脑或手机上运行,是学习数控系统编程的辅助工具。 ②安卓操作系统EtherCAT主站驱动程序和控制系统 PCAT Master, 在安卓操作系统平板电脑上运行,具有可编程运动控制器控制功能。③通用数控运动控制器,由本实验室与北京硕客爱能科技有限公司合作开发,具有电子齿轮、电子凸轮、专用插补等功能,已经批量用于多种数控机械设备。④使用手机短信的自动化设备运行状态远程监测和数据采集器,由本实验室与北京易能立方科技有限公司合作开发。已经批量用于数控机床远程故障数据采集,支持数控机床可靠性评价(MTBF)。
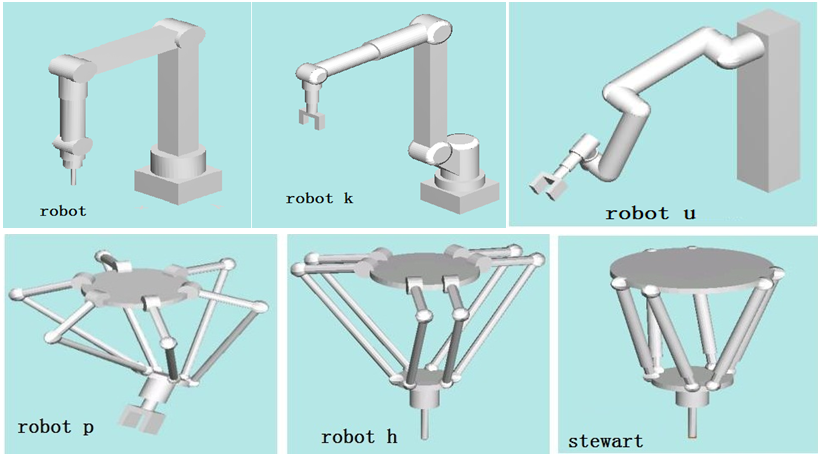

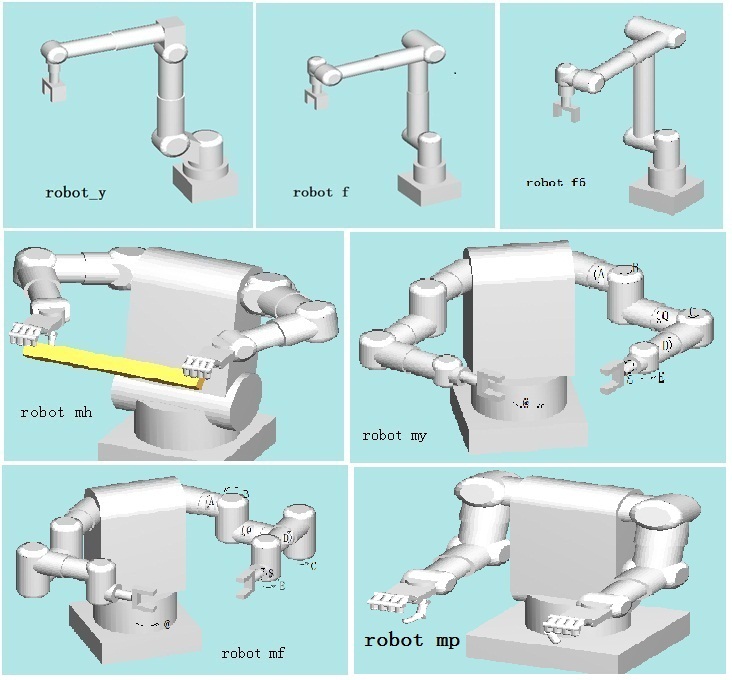

- 虚拟工业机器人安装和简介
- 虚拟工业机器人演示视频1
- 虚拟工业机器人演示视频2
- 虚拟工业机器人演示视频m1
- 虚拟工业机器人演示视频mp4
- 虚拟工业机器人演示视频mp5
- 虚拟工业机器人演示视频mp7
- 虚拟工业机器人演示视频4
- 虚拟工业机器人演示视频5
- 虚拟工业机器人演示视频6
- 虚拟工业机器人演示视频7
- 虚拟工业机器人演示视频f6s-p2工具姿态和奇异点
- 虚拟工业机器人演示视频f7-p2工具姿态和奇异点
- 虚拟工业机器人演示视频s7-p2工具姿态和奇异点
- 虚拟工业机器人演示视频f7-p7轮廓
- 虚拟工业机器人演示视频f6-p7轮廓
- 虚拟工业机器人演示视频f6-p2工具姿态和奇异点
- 虚拟工业机器人演示视频mhp4
- 虚拟工业机器人演示视频mhp5
- 虚拟工业机器人演示视频mhp10
- 虚拟工业机器人演示视频myp4
- 虚拟工业机器人演示视频mfp7
- 虚拟工业机器人演示视频mp p4
- 虚拟工业机器人演示视频mp p5
- 虚拟工业机器人演示视频mp p7
- 虚拟工业机器人演示视频d7 p10
- APK下载:
- 虚拟工业机器人下载
- pad_robot.apk(rar) 参数文件pad-robot.xls
- pad_robot_k.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_h.apk(rar) 参数文件pad-robot-h.xls
- pad_robot_p.apk(rar) 参数文件pad-robot-h.xls
- pad_robot_u.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_2u.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_x7.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_u7.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_u7p.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_2x7.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_2u7.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_s7p.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_m.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_mh.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_u6p.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_y.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_f.apk(rar) 参数文件pad-robot-k.xls
- pad_robot_d7.apk(rar) 参数文件pad-robot-k.xls
- Introduction and install of virtual robot
- APK download:
- pad_robot_en.apk(rar) parameter:pad-robot-en.xls
- pad_robot_hen.apk(rar) parameter:pad-robot-hen.xls
虚拟数控机床下载 PAD TURN/MILL Download

- 虚拟数控机床安装和简介
- 虚拟数控铣床演示视频
- APK 车床下载: 平板电脑版pad_turn.apk(rar) 手机版mbp_turn.apk(rar) 参数文件pad_turn.xls
- APK 铣床下载: 平板电脑版pad_mill.apk(rar) 手机版mbp_mill.apk(rar) 参数文件pad_mill.xls
- APK turning download:
- PAD version:pad_turn_en.apk(rar) Mobile version:mbp_turn_en.apk(rar) Parameter file:pad_turn_en.xls
- APK milling download:
- PAD version:pad_mill_en.apk(rar) Mobile version:mbp_mill_en.apk(rar) Parameter file:pad_mill_en.xls
2019-09-工业以太网现场总线EtherCAT驱动程序设计及应用(专著)
2018-06-工业机器人运动仿真编程实践-基于Android和Open Gl(专著)
2018-01-安卓操作系统平板电脑数控系统示例--六杆并联吊机(视频)
2017-09-平板电脑EtherCAT主站驱动程序和控制系统示例
2016-06-安卓操作系统EtherCAT主站和虚拟数控机床
2016-02-平板电脑EtherCAT主站自动控胶成型机控制系统
2012-11-基于XSLT的通用STEP-NC后置处理器开发
2011-09-基于XML的EtherCA类工业以太网协议解析技术
2011-09-基于工业控制编程语言IEC 61131-3的数控系统软件设计(专著)
2009-02-工业以太网EtherCAT冗余和热插拔技术研究
2008-10-数控机床NURBS曲线插补运动误差分析与仿真
2008-01-基于PCI和DSP构架的固化协议SERCOS通讯卡研究
2004-04-IEEE1394协议虚拟复合MAC工业现场总线研究
2003-4-数控机床动态轨迹误差的MATLAB仿真计算方法研究
1997-06- CNC系统数字伺服接口协议SERCOS
1996-06-AutoCAD支持下的数控车床自动编程系统
1996-4-扩展数控语言及其应用
1996-2-数控车床图形仿真功能及其实现
1995-2-在PC上实现的多轴多通道数控软件系统
1989-5-Robotersysteme-工业机器人动态运动误差仿真方法(德)
1986-05-Wt Zeitschrift 数控机床样条插补器(德)
1983-5-一种新的数控机床轨迹控制方法